采集
点云、卫星影像、GIS 图层与现场记录,构成可以被系统读取的空间证据。
Point clouds, satellite imagery, GIS layers, and site records become a spatial evidence base.
建筑 / 计算 / 人工智能
Architecture / Computation / Artificial Intelligence
Intelligent infrastructure for spatial generation.
Spatial AI 是一个处于前期原型研发阶段的空间智能系统,用来连接场地采集、空间分析、语义理解与设计构建。
An early-stage prototype system for capturing, reading, understanding, and constructing spatial form.
原型系统
Prototype System
From spatial evidence to design intelligence.
点云、卫星影像、GIS 图层与现场记录,构成可以被系统读取的空间证据。
Point clouds, satellite imagery, GIS layers, and site records become a spatial evidence base.
道路、水系、建筑、轴线、密度、拓扑与地形被拆解为可测量的空间图层。
Roads, water, buildings, axes, density, topology, and terrain are extracted as measurable layers.
空间结构被翻译为聚落类型、语义关系、层级结构与可解释的空间语法。
Spatial structure is translated into settlement types, semantic relationships, and grammar patterns.
规划动作、生成约束与设计反馈进入同一个迭代流程,用于辅助空间方案判断。
Planning moves, generative constraints, and design feedback become part of an iterative workflow.
研究迭代
Research Evolution
Version-by-version prototypes: each output is a visible step in the spatial intelligence pipeline.
水体存在度与水系依赖度被量化为城市空间特征。
Water presence and dependency are quantified as urban spatial signatures.
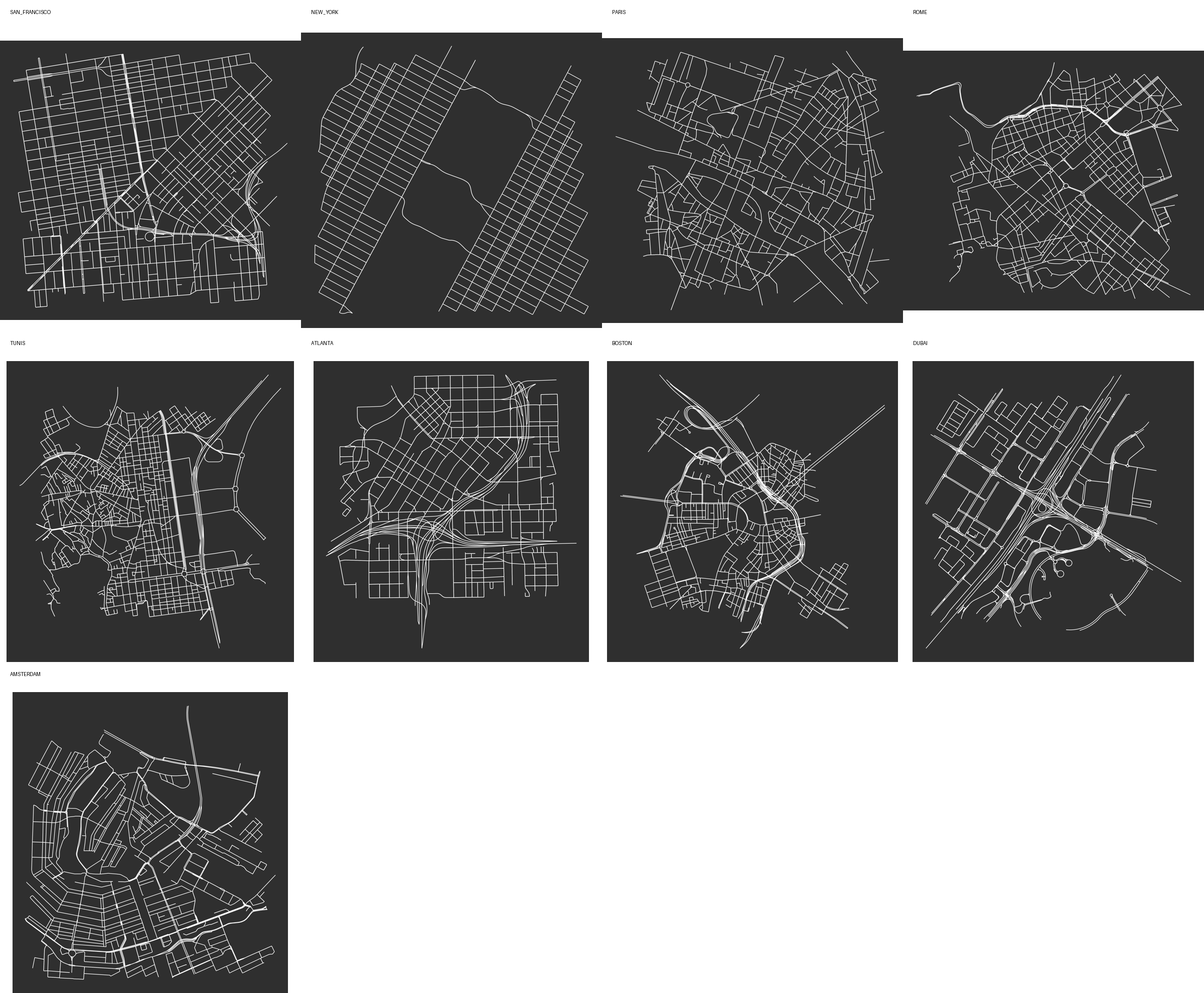
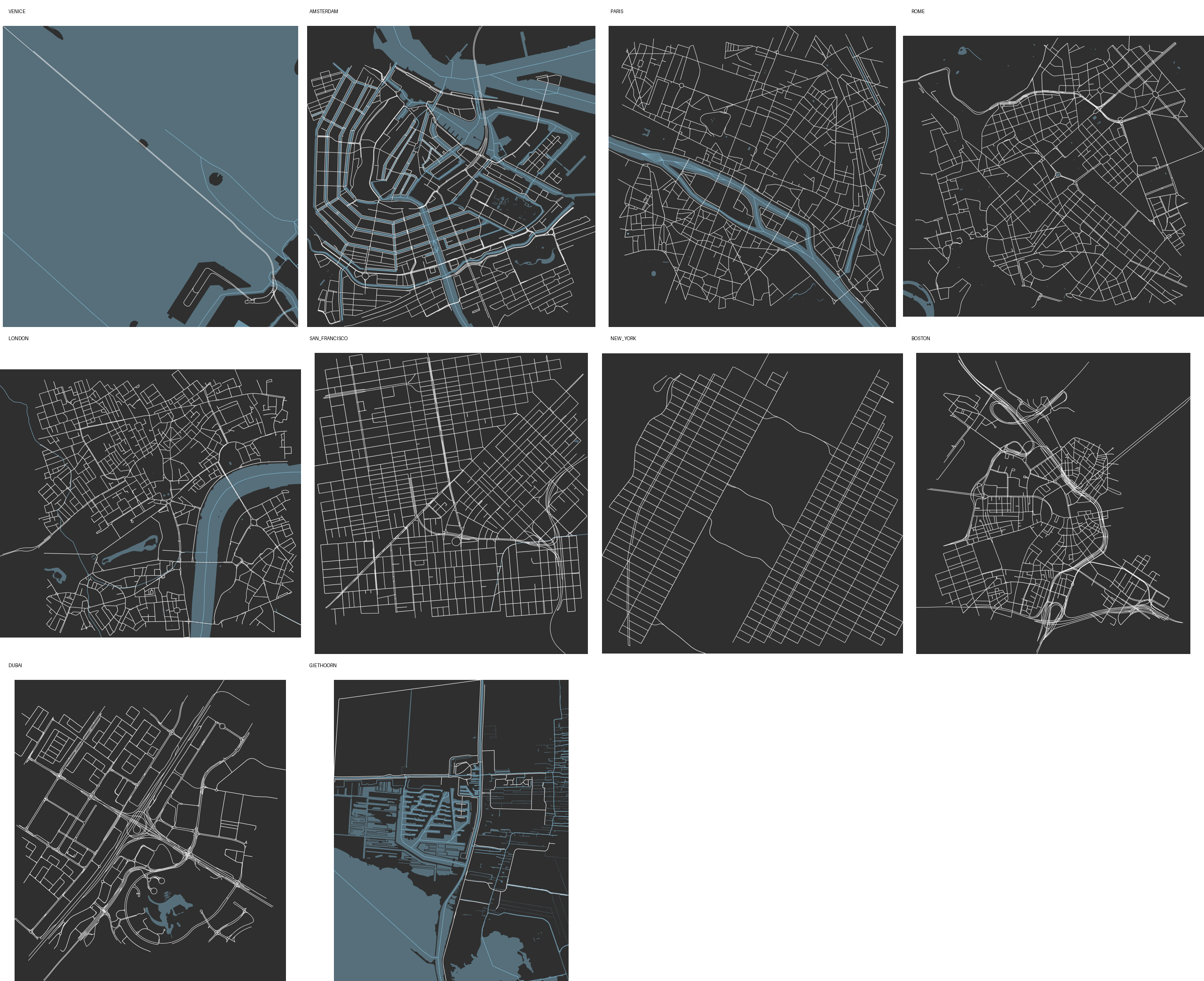
基于 OSM 的城市尺度图底研究建立形态可视化与指标基准。
City-scale OSM studies establish visual and metric baselines for urban form.
水系拓扑与建筑依赖关系开始具备跨案例比较能力。
Water topology and building dependency become comparable across cases.
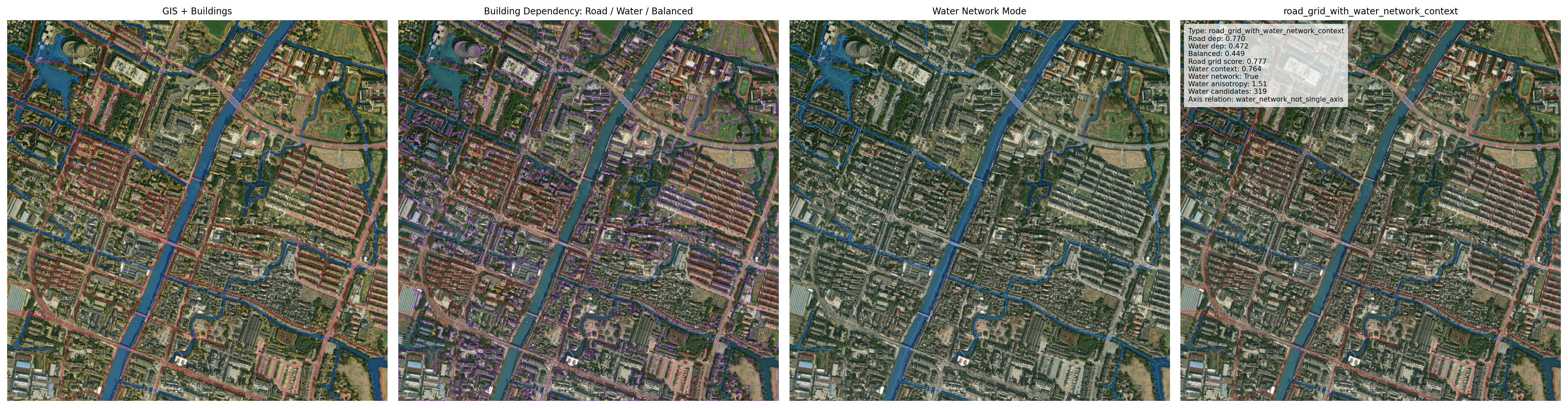
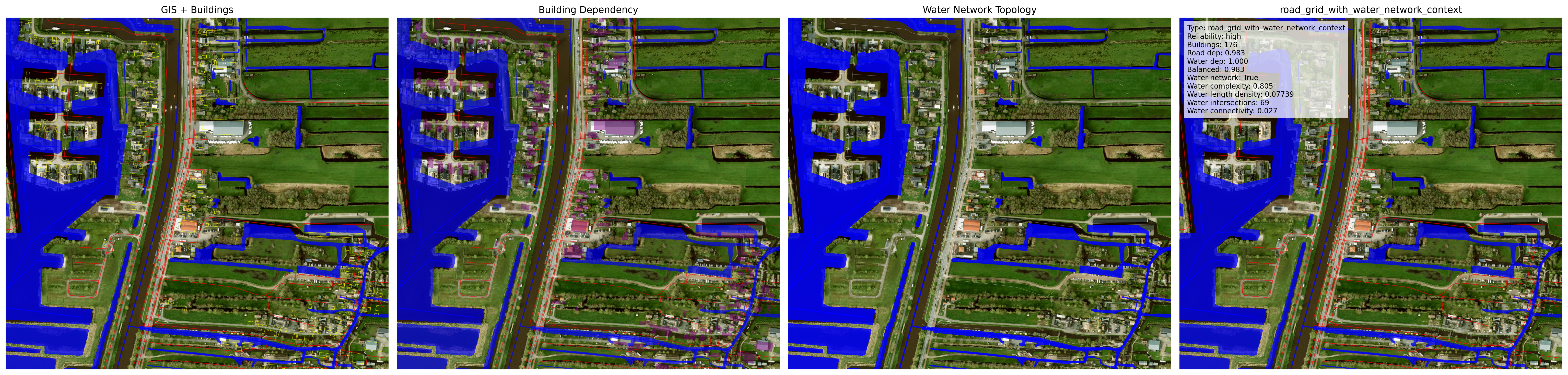
地理配准影像、OSM、建筑提取与可靠性检查被合并为单一流程。
Georeferenced image, OSM, fallback building extraction, and reliability checks converge.
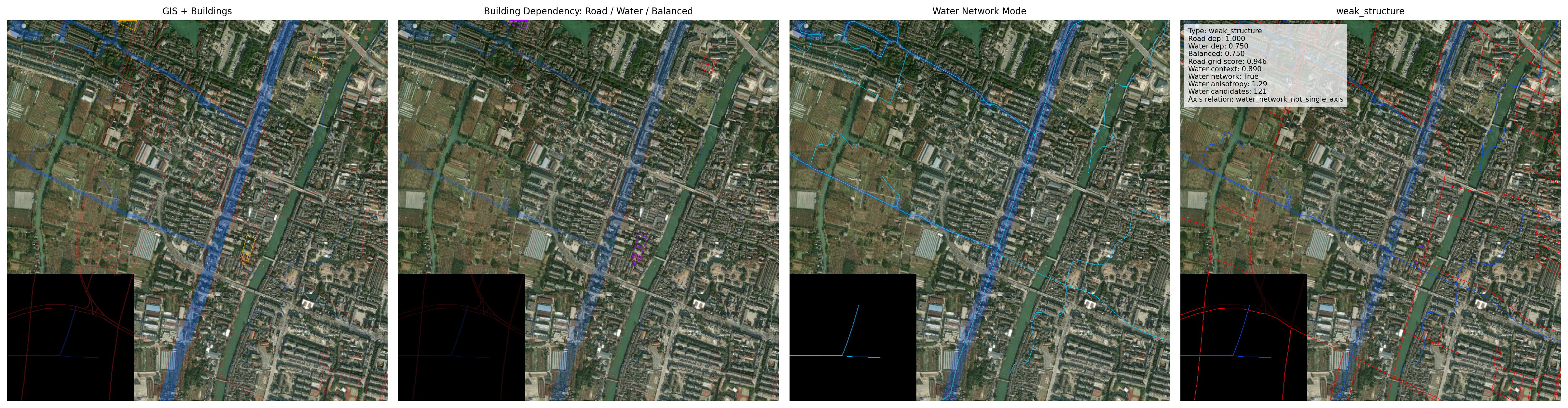
道路、水系与建筑依赖关系被转化为空间关系判断。
Road, water, and building dependency are classified as spatial relationships.
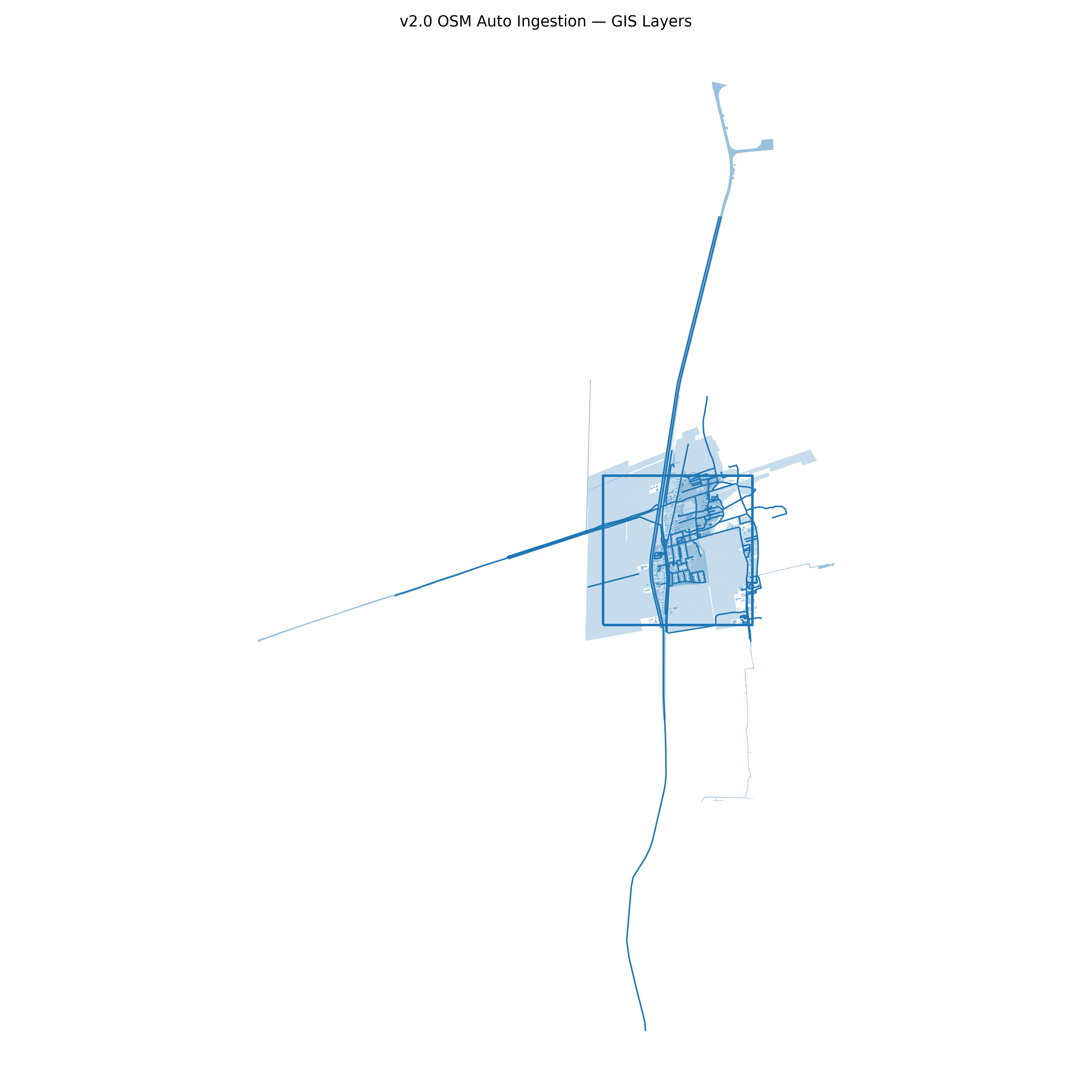
开放地理数据进入空间智能管线,成为可复用的数据来源。
Public geodata becomes part of the spatial intelligence pipeline.

道路、水系与建筑图层把图像结构连接到真实地理坐标。
Road, water, and building layers connect image-derived structure to real coordinates.
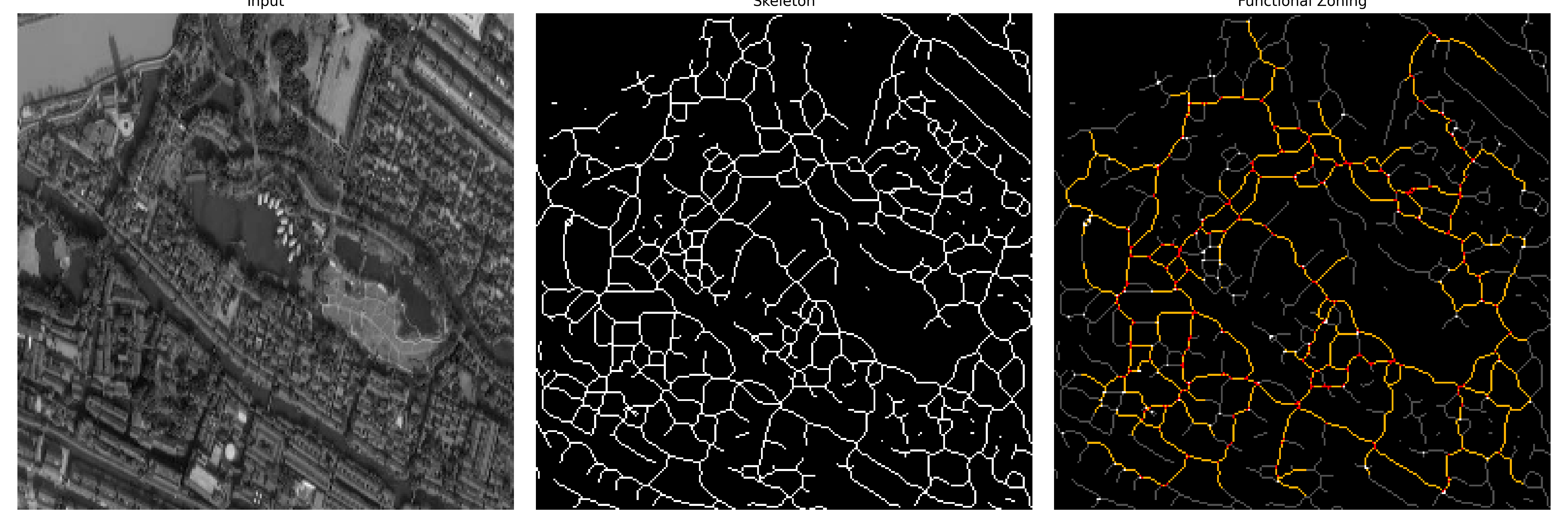
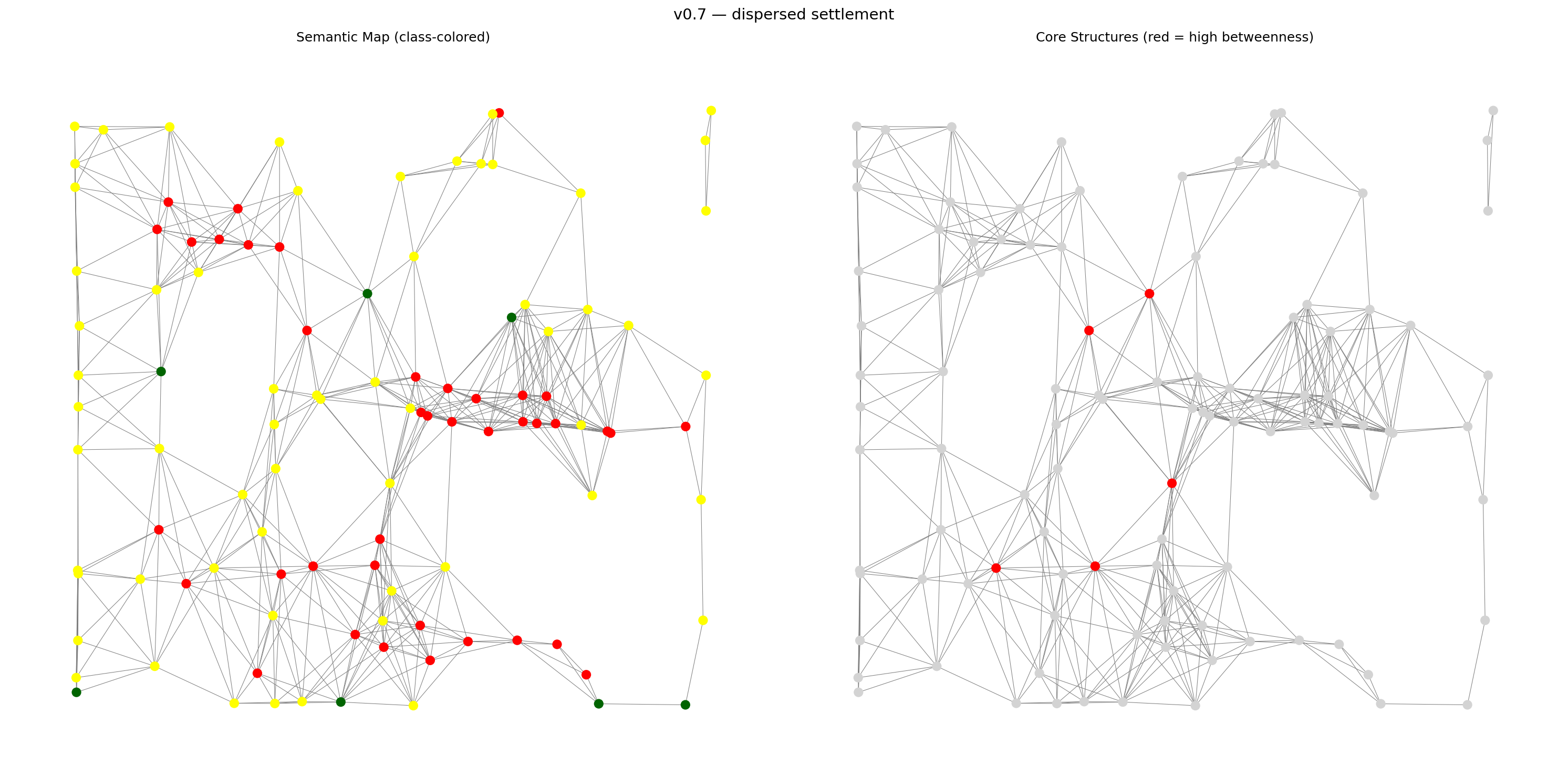
核心、廊道、居住与边界分区,把图结构转化为设计反馈。
Core, corridor, residential, and boundary zones turn graph structure into design feedback.
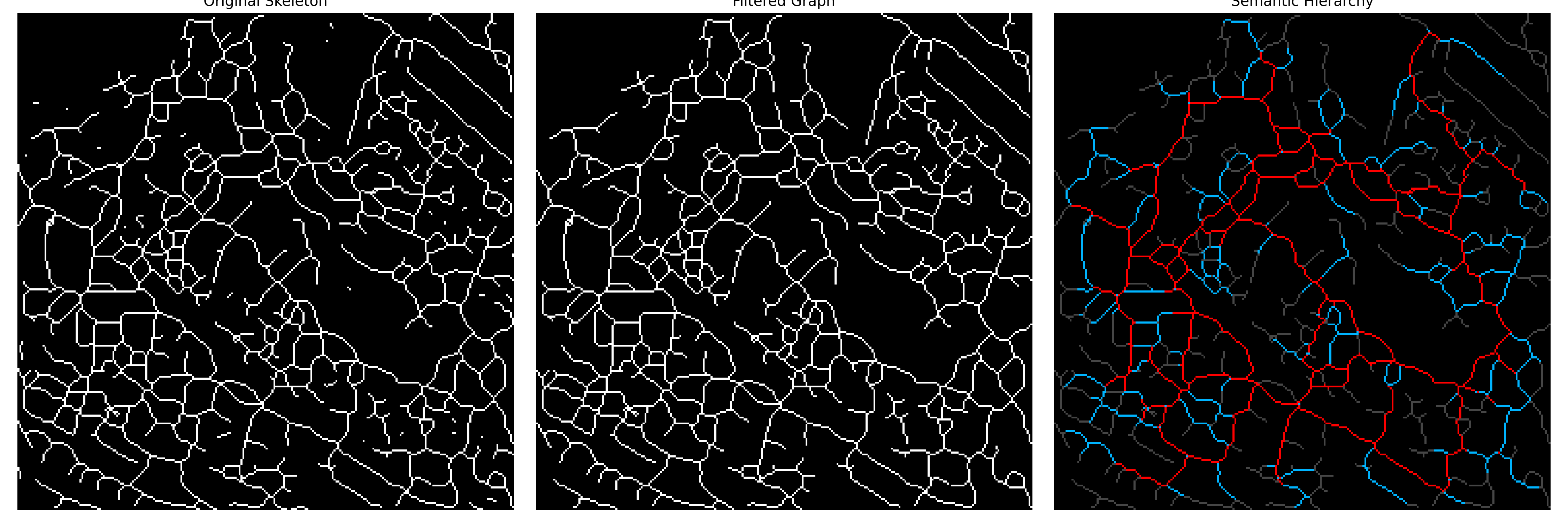
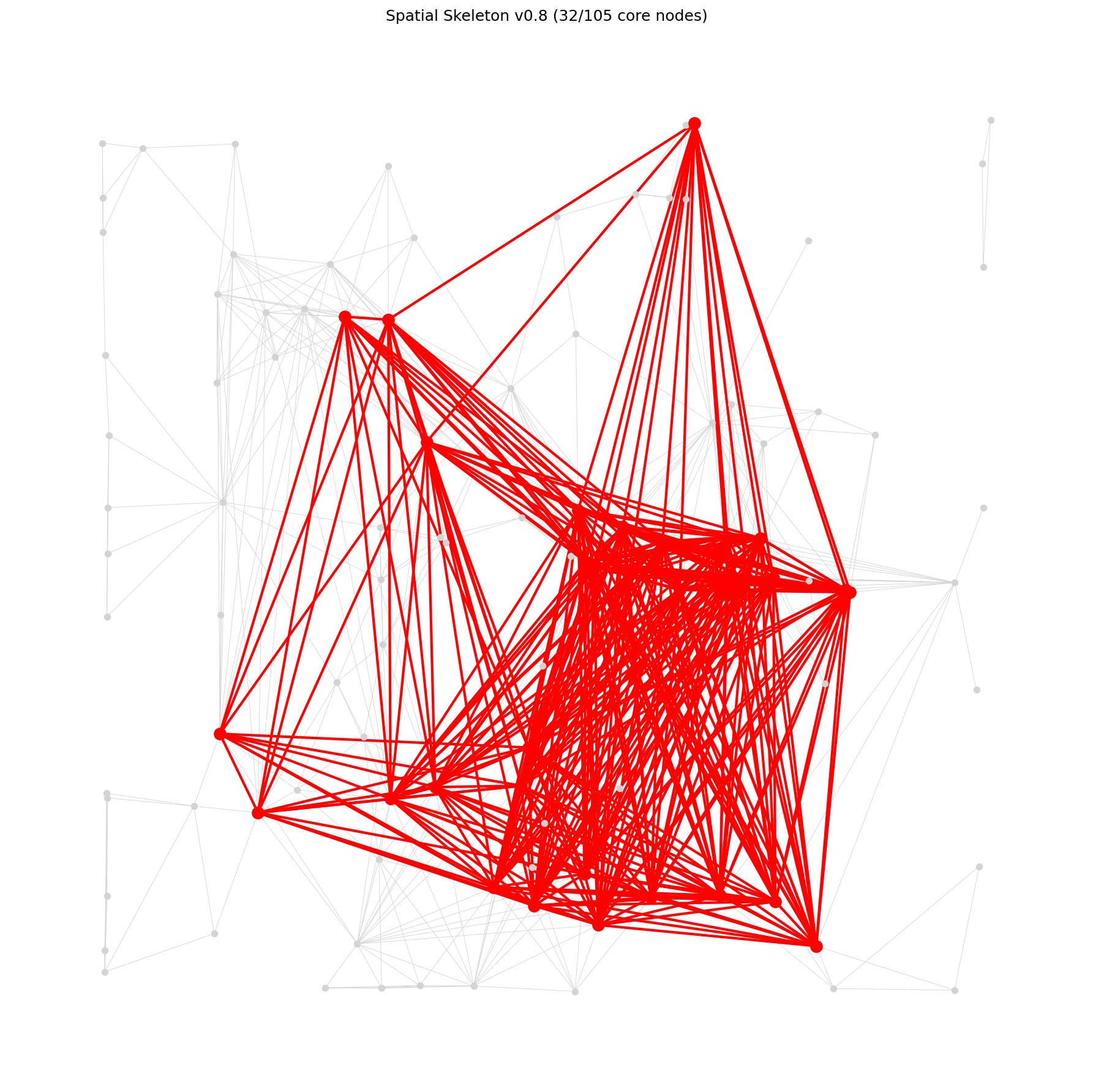
介数中心性与节点度把空间构件组织成可操作的层级。
Betweenness and degree organize spatial components into operational layers.
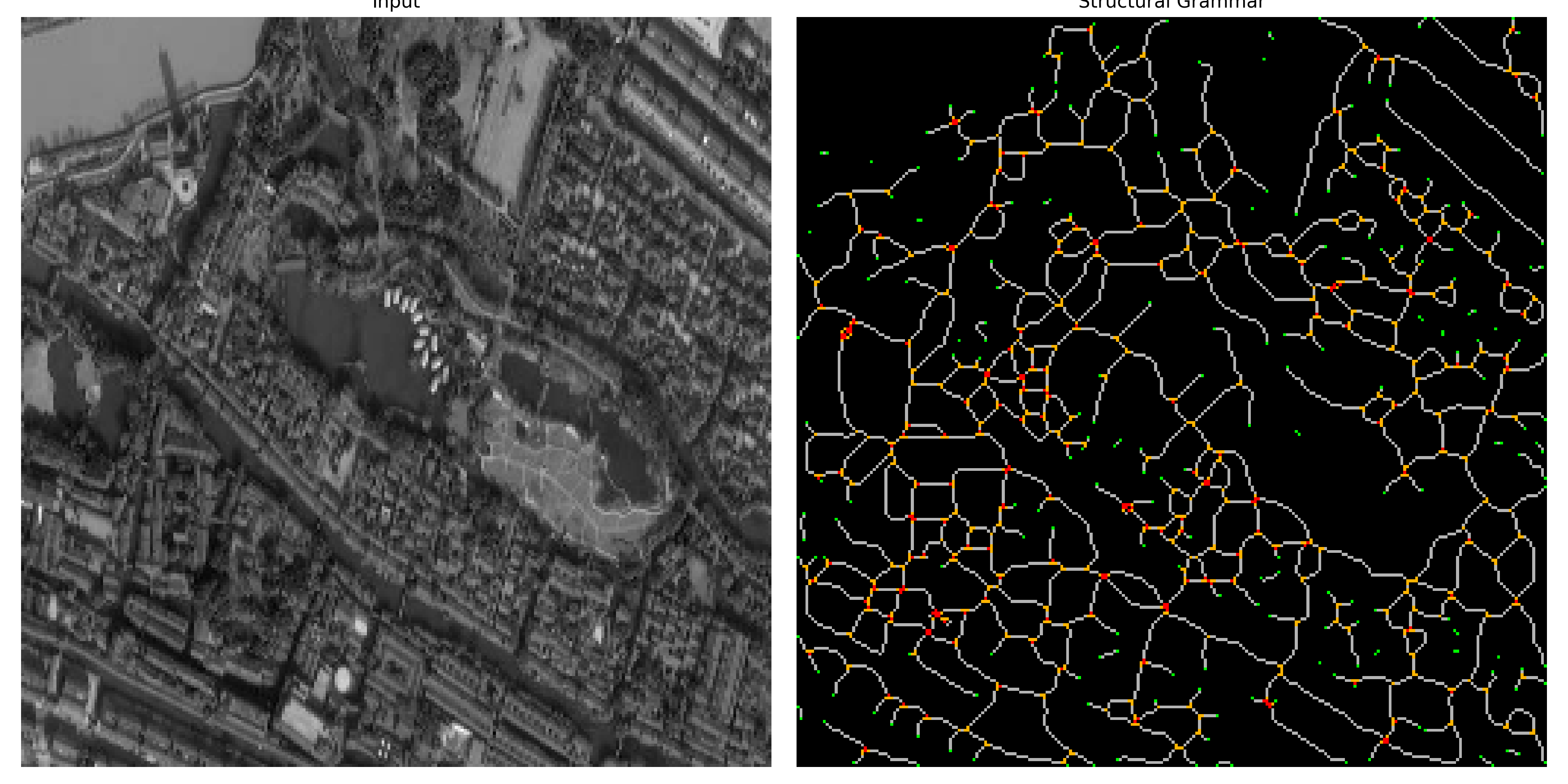
拓扑规则把复杂网络翻译为可识别的聚落语法类型。
Topology rules translate networks into recognizable settlement grammars.
噪声剔除率成为判断结构可靠性的可测指标。
Noise removal becomes a measurable indicator of structural reliability.
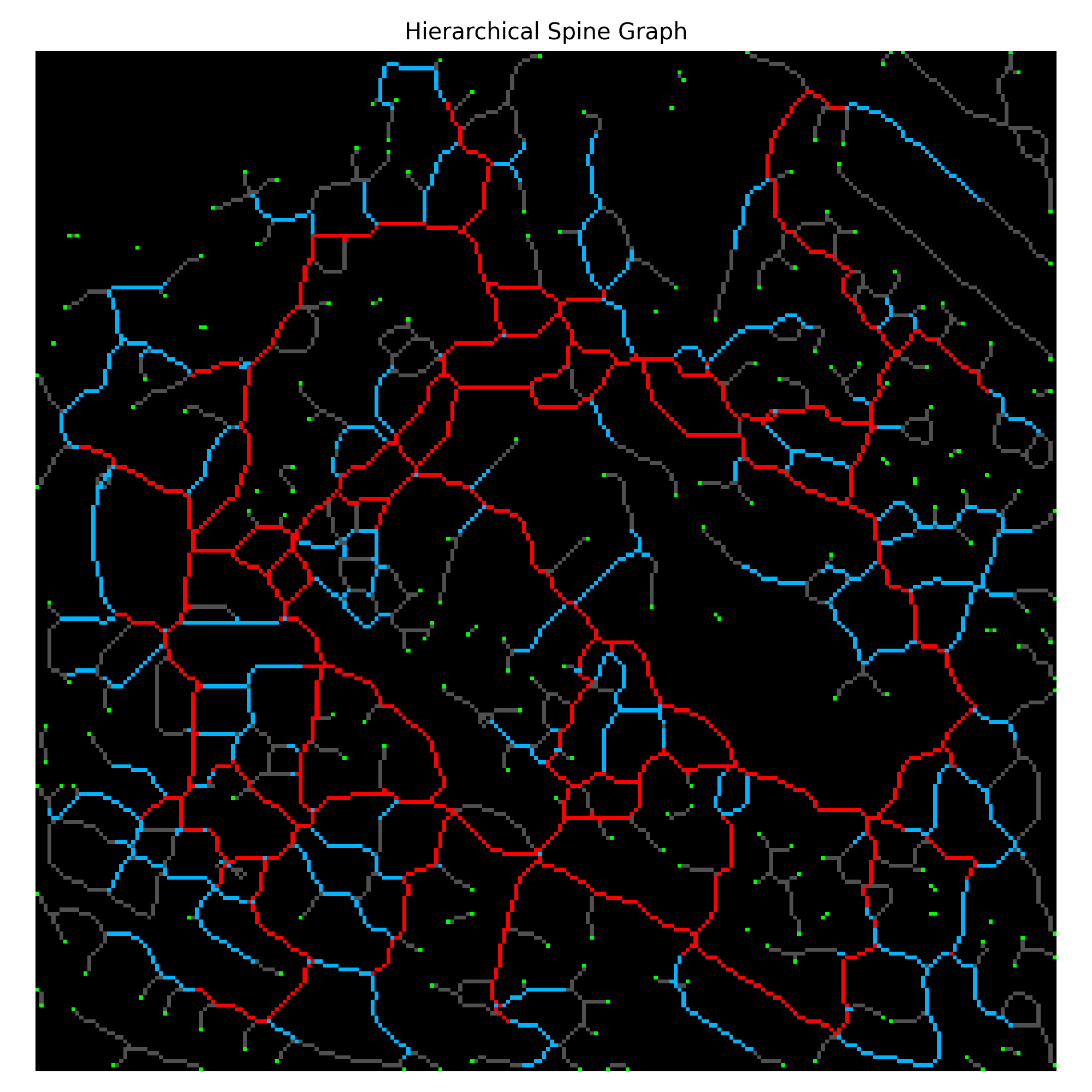
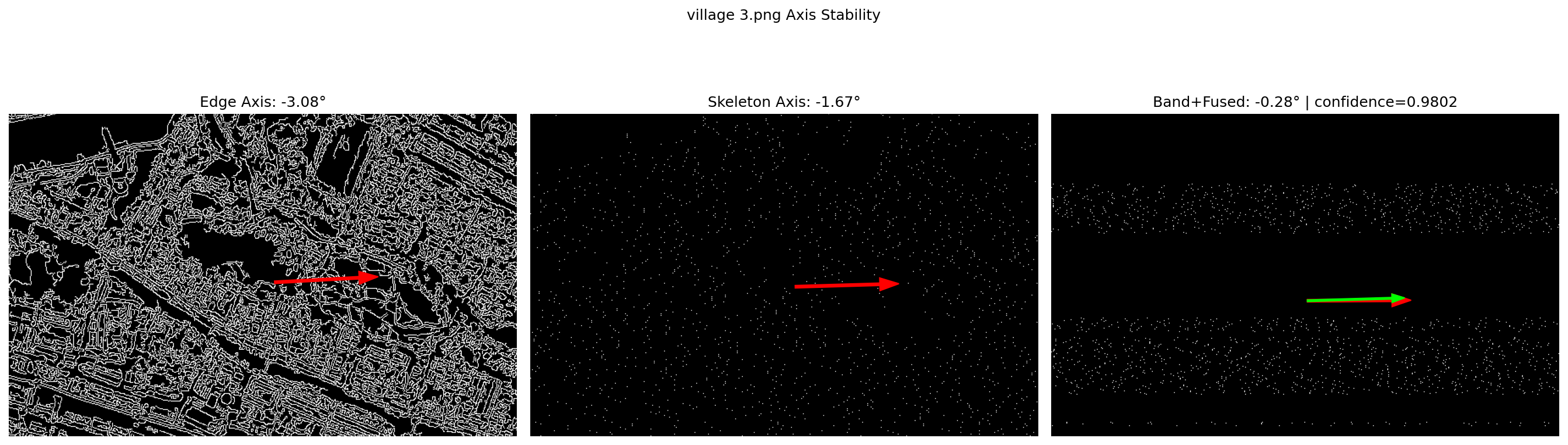
主轴、次轴、局部路径与死胡同共同定义空间层级。
Main, secondary, local, and dead-end paths define spatial hierarchy.
系统从场模拟转向可读取、可解释的结构智能。
The project turns from field generation toward readable structural intelligence.
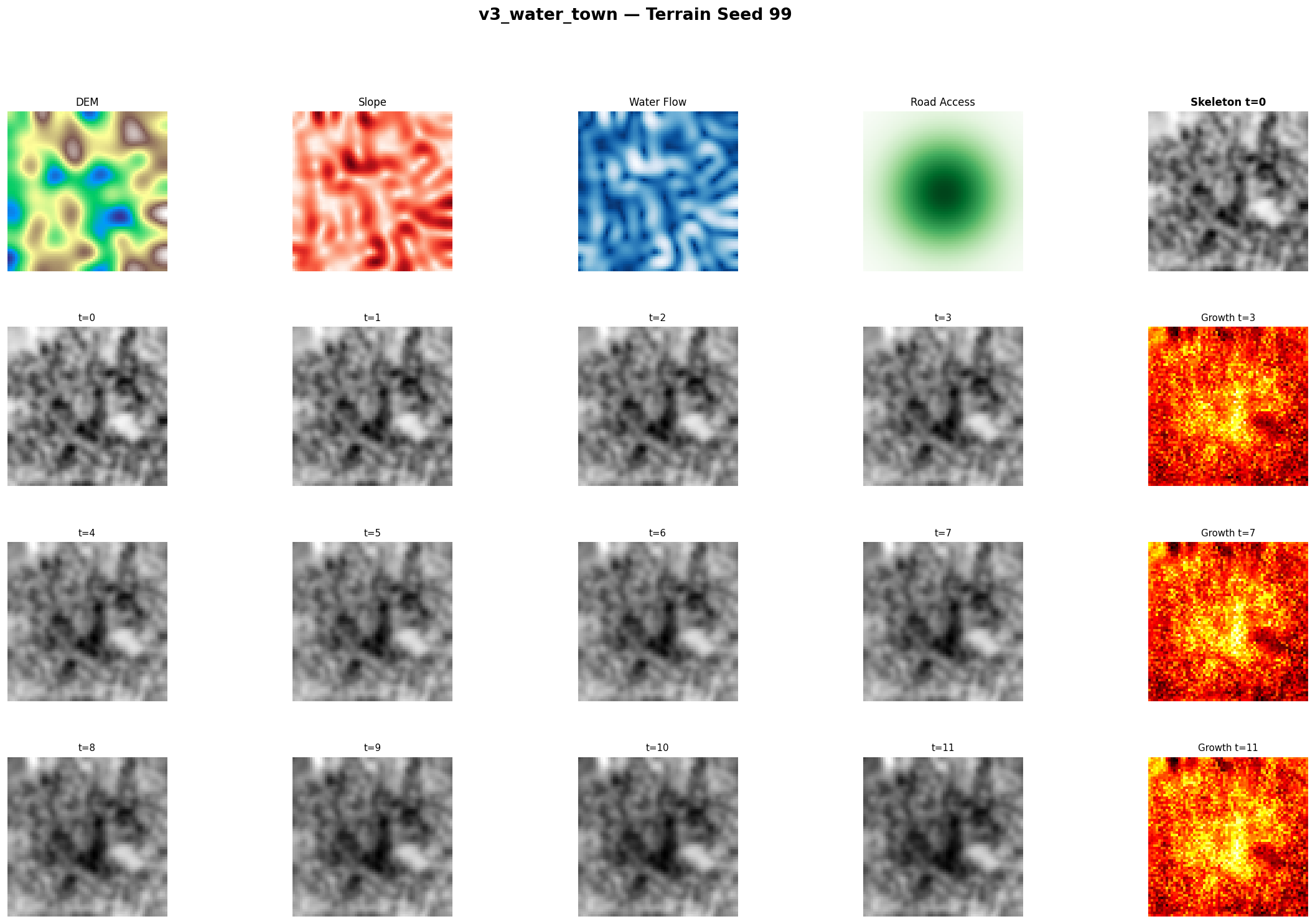
地形耦合进一步确认:聚落结构不能只依赖连续场模拟生成。
Terrain coupling confirms that structure needs more than continuous simulation.

采样、方向编辑与形态变换暴露了无约束空间生成的局限。
Sampling and direction edits expose the limits of unconstrained spatial generation.
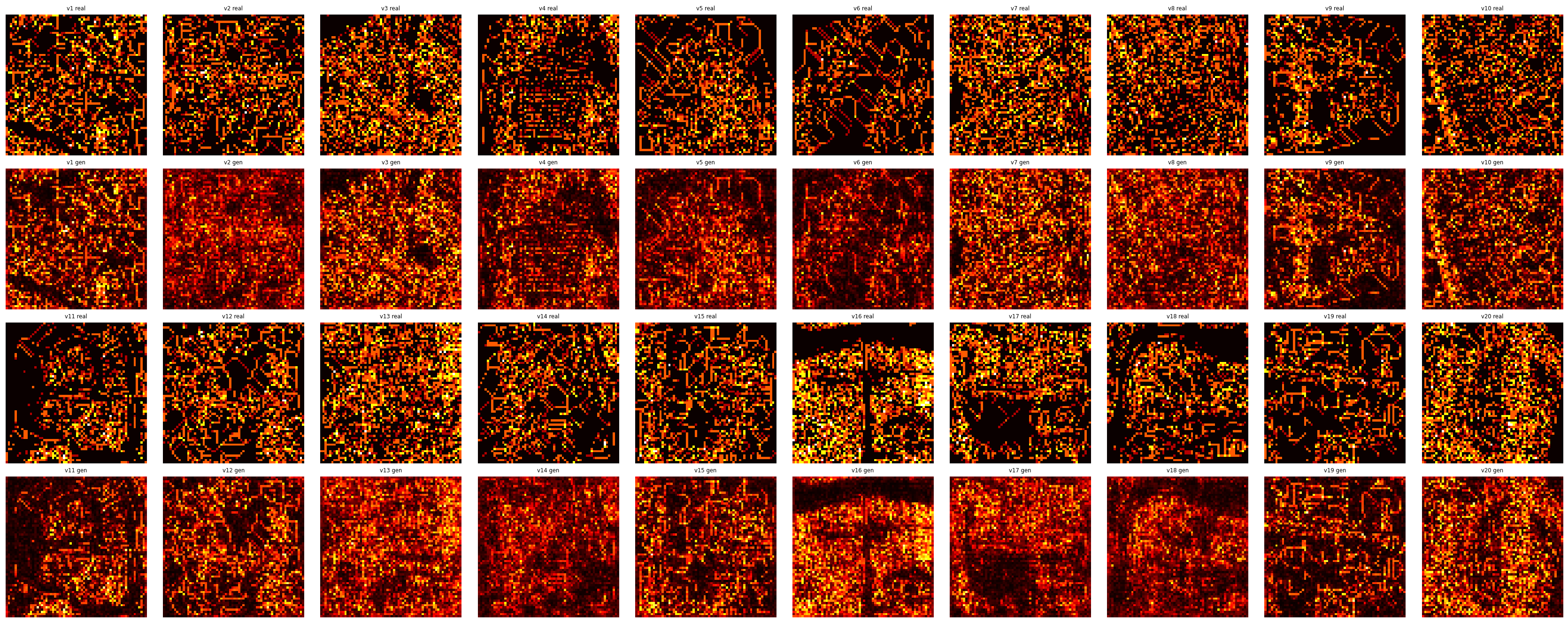
解码骨架测试学习到的空间表征是否能够支撑生成。
Decoded skeletons test whether learned representations can support generation.
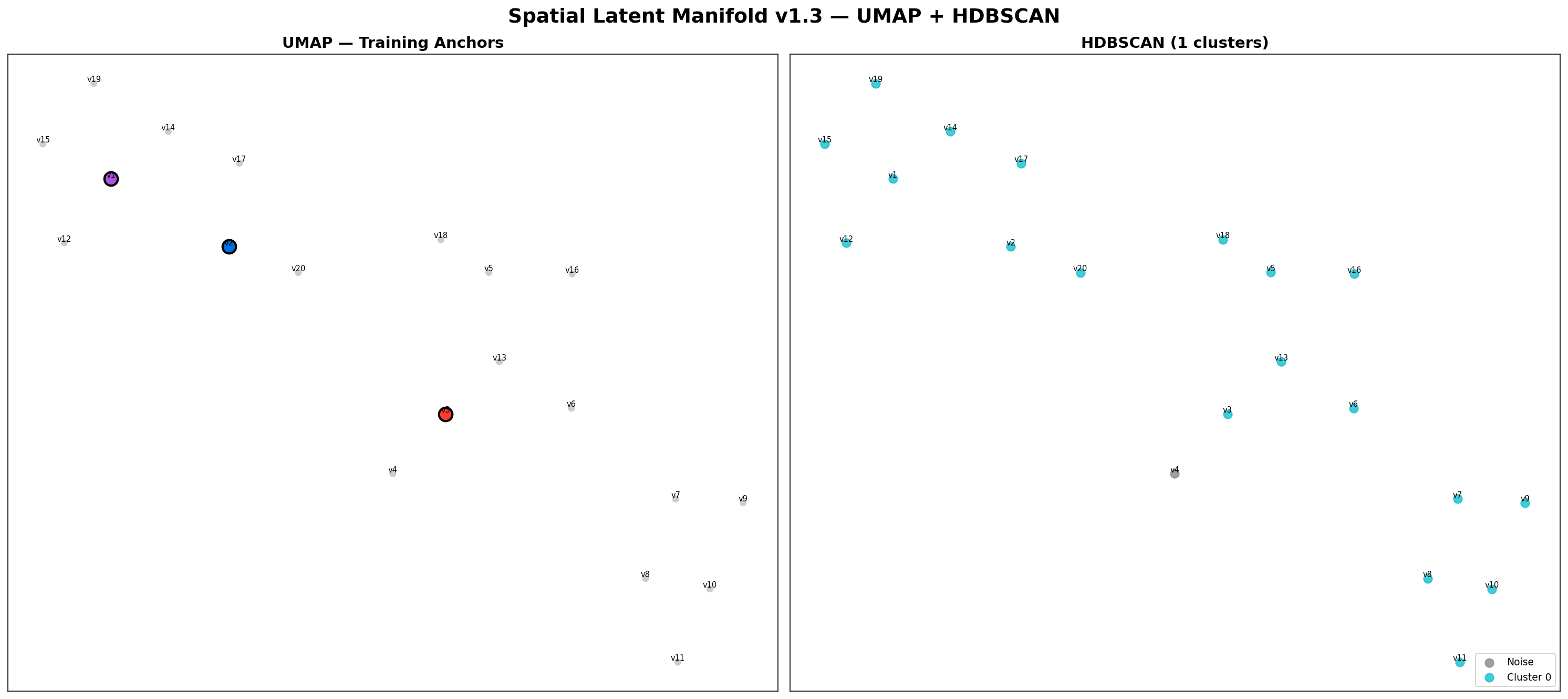
UMAP 与聚类揭示内陆型、线性型与水乡型聚落之间的连续关系。
UMAP and clustering reveal inland, linear, and water-town continua.
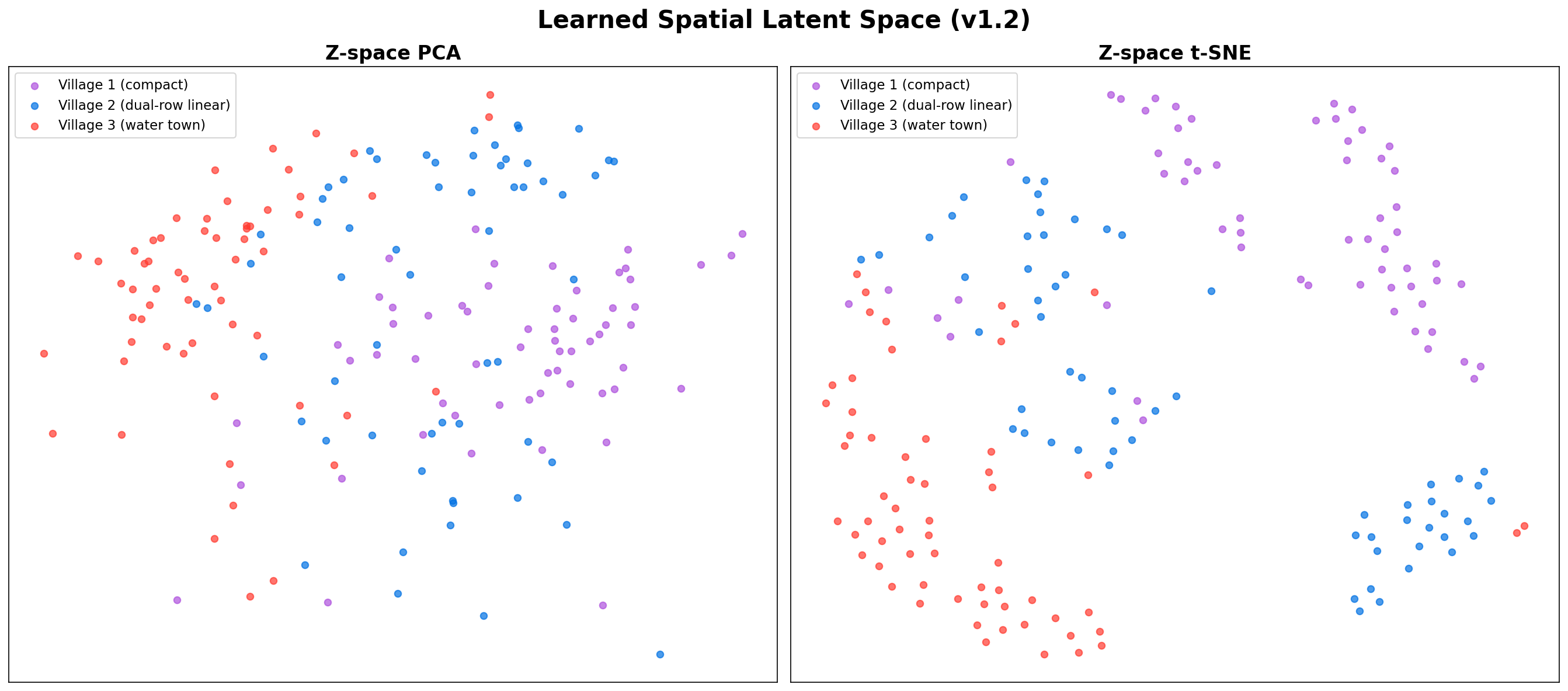
对比学习把空间形态转化为可以比较、聚类和泛化的表征空间。
Contrastive learning turns spatial form into a representation space that can be compared.
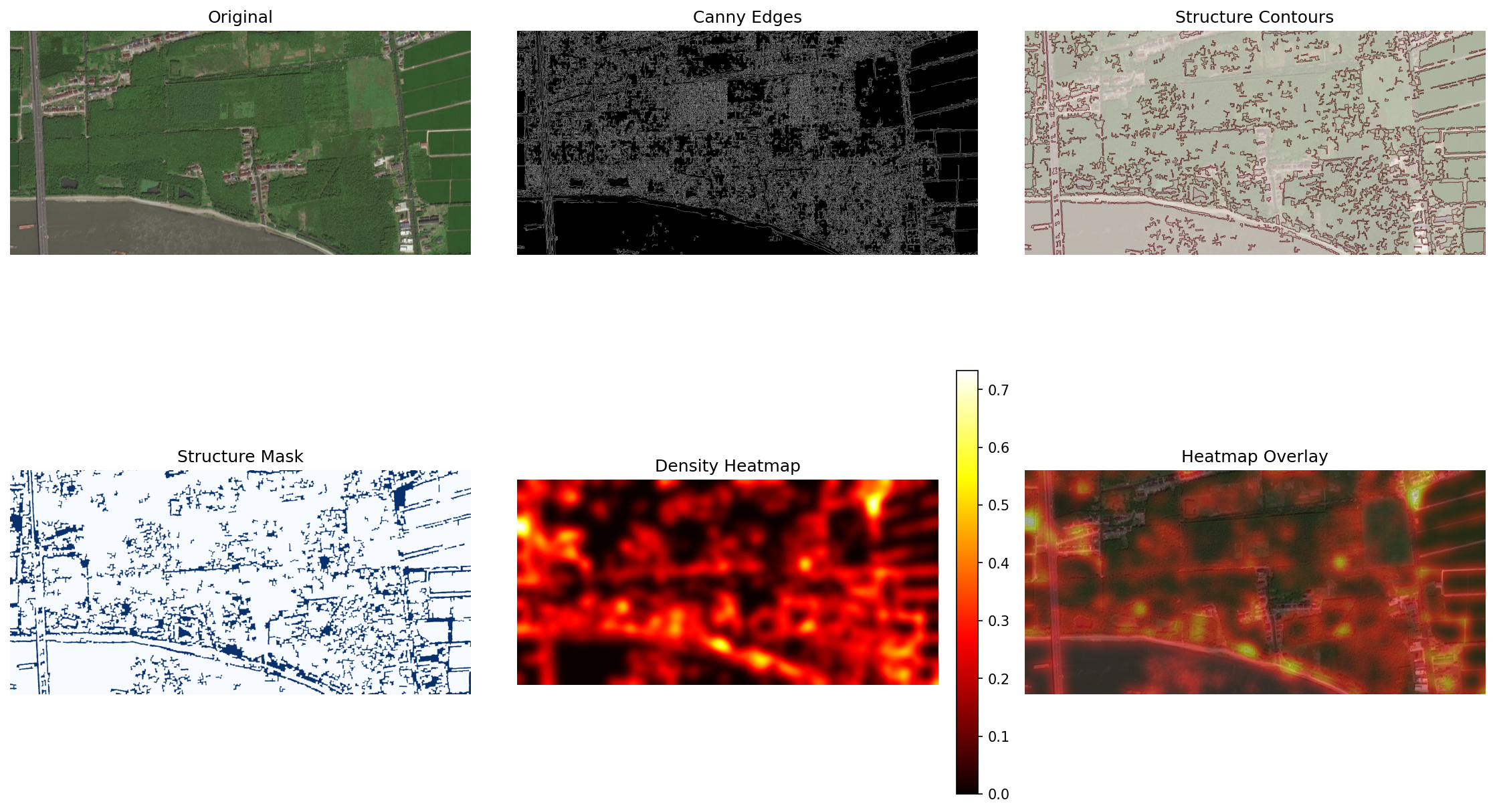
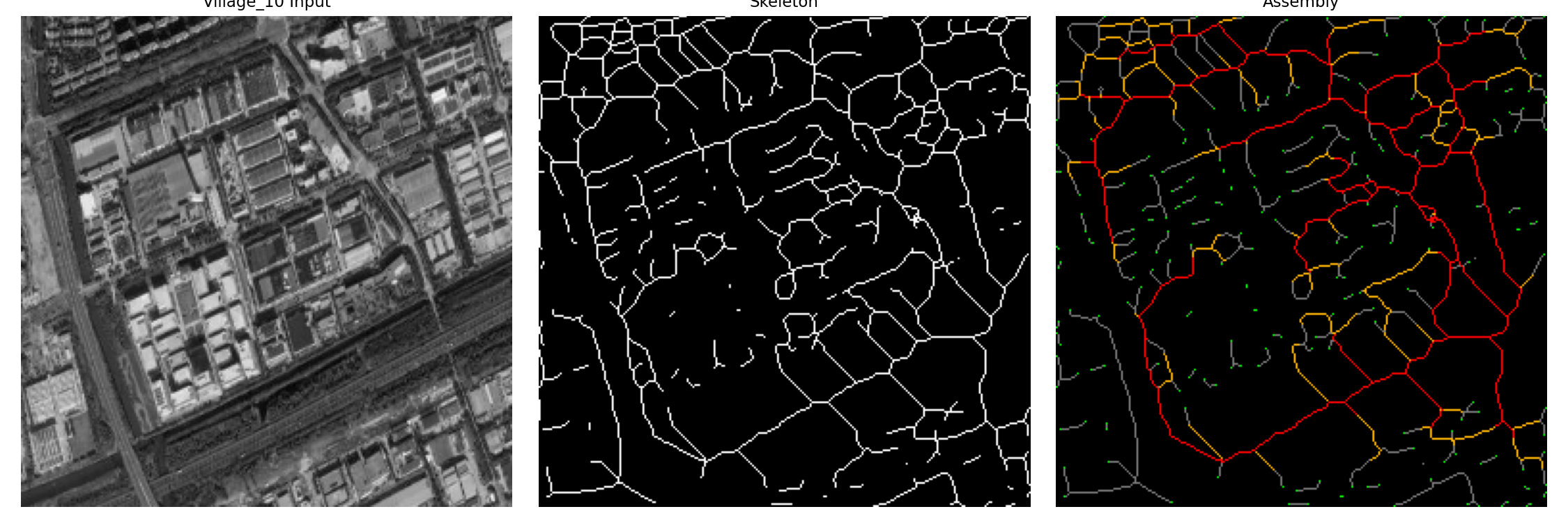
SAM、语义叠加、骨架、图分析与一致性检查构成首个稳定版本。
SAM, semantic overlays, skeletons, graph analysis, and consistency checks stabilize the first pipeline.
形态、轴线、带状结构、置信度与一致性进入多模块原型测试。
Early multi-module tests compare morphology, axis, bands, confidence, and consistency.
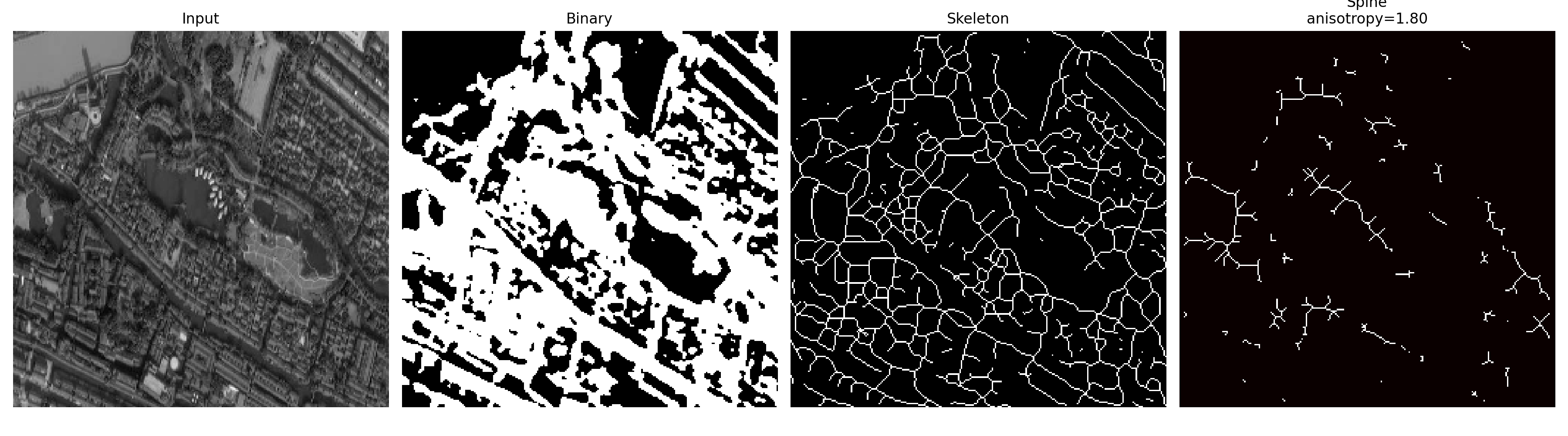
二值掩膜开始把聚落结构转译为可分析的线性骨架。
Binary masks begin to expose settlement structure as lines.
从卫星图像进入基础空间统计,形成第一条可运行管线。
Satellite image to basic measurable spatial statistics.
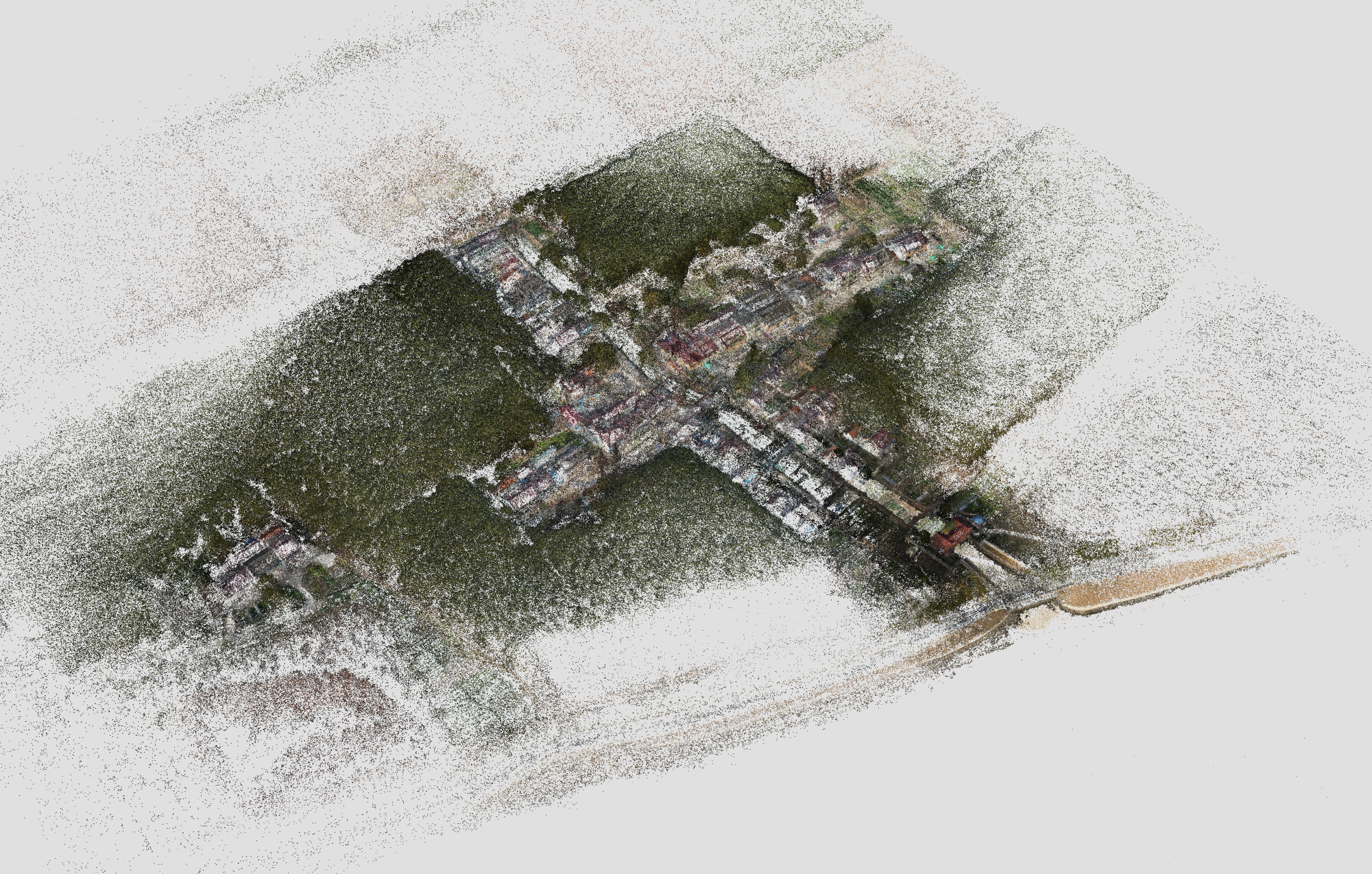
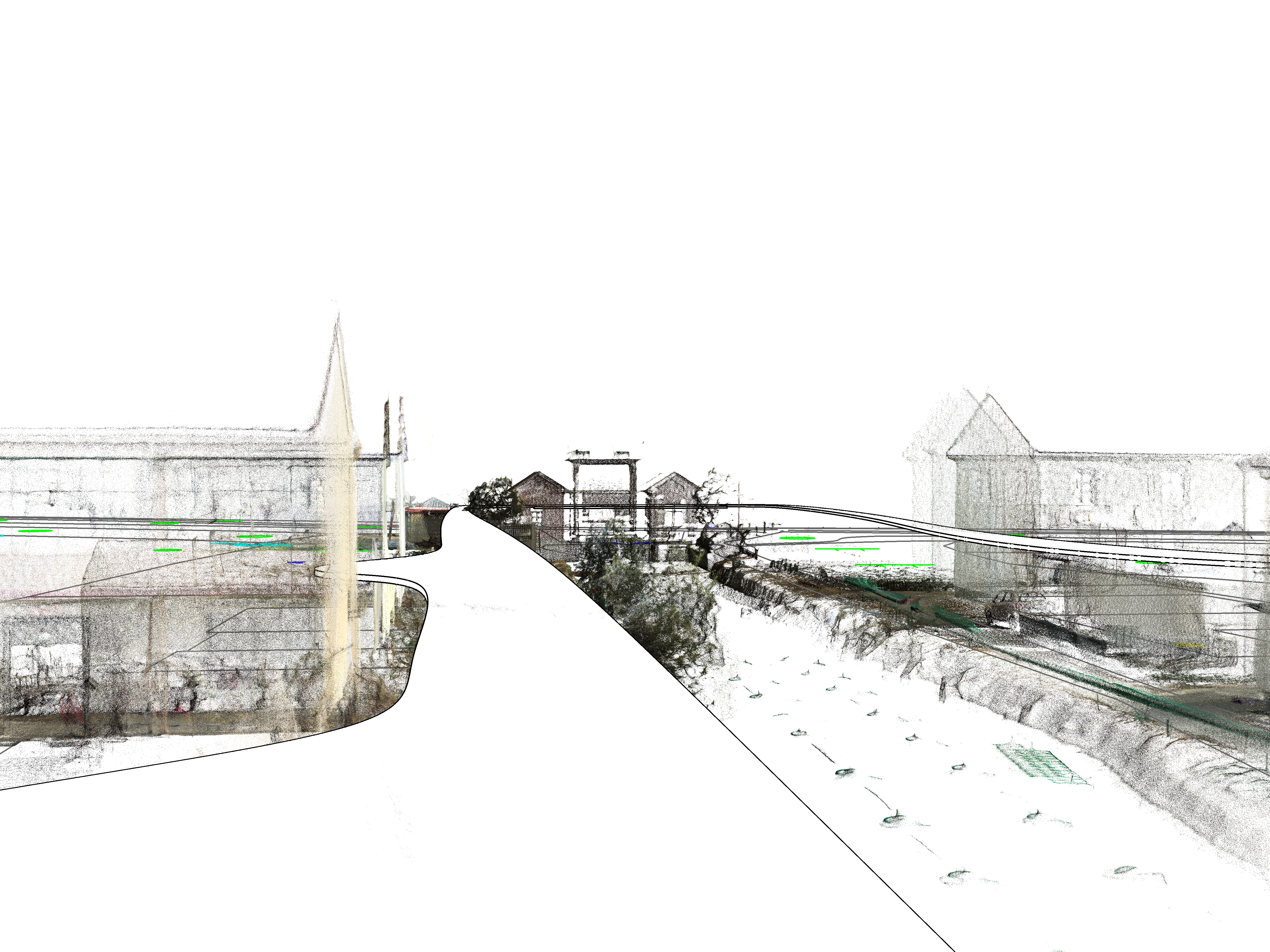
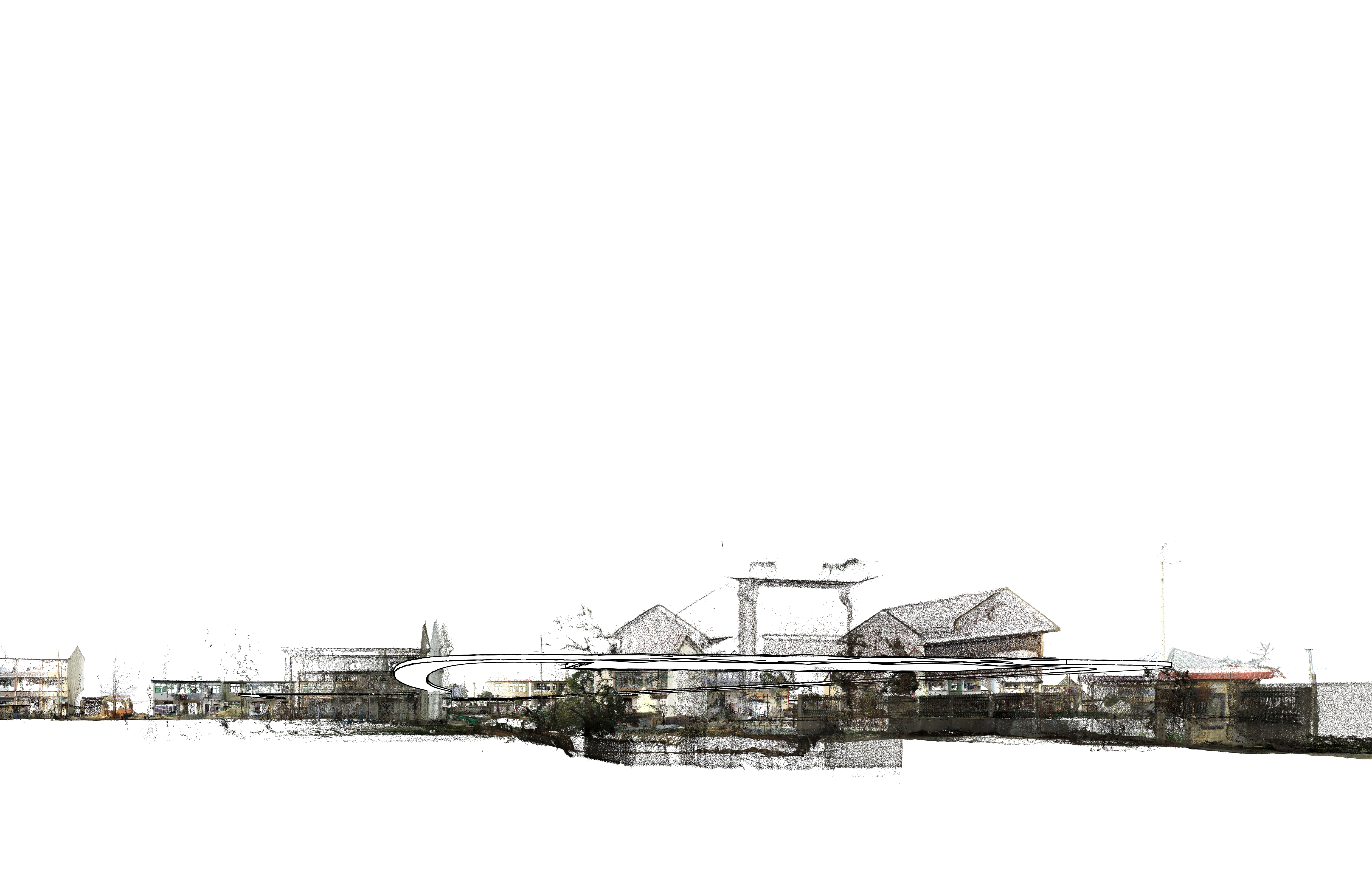
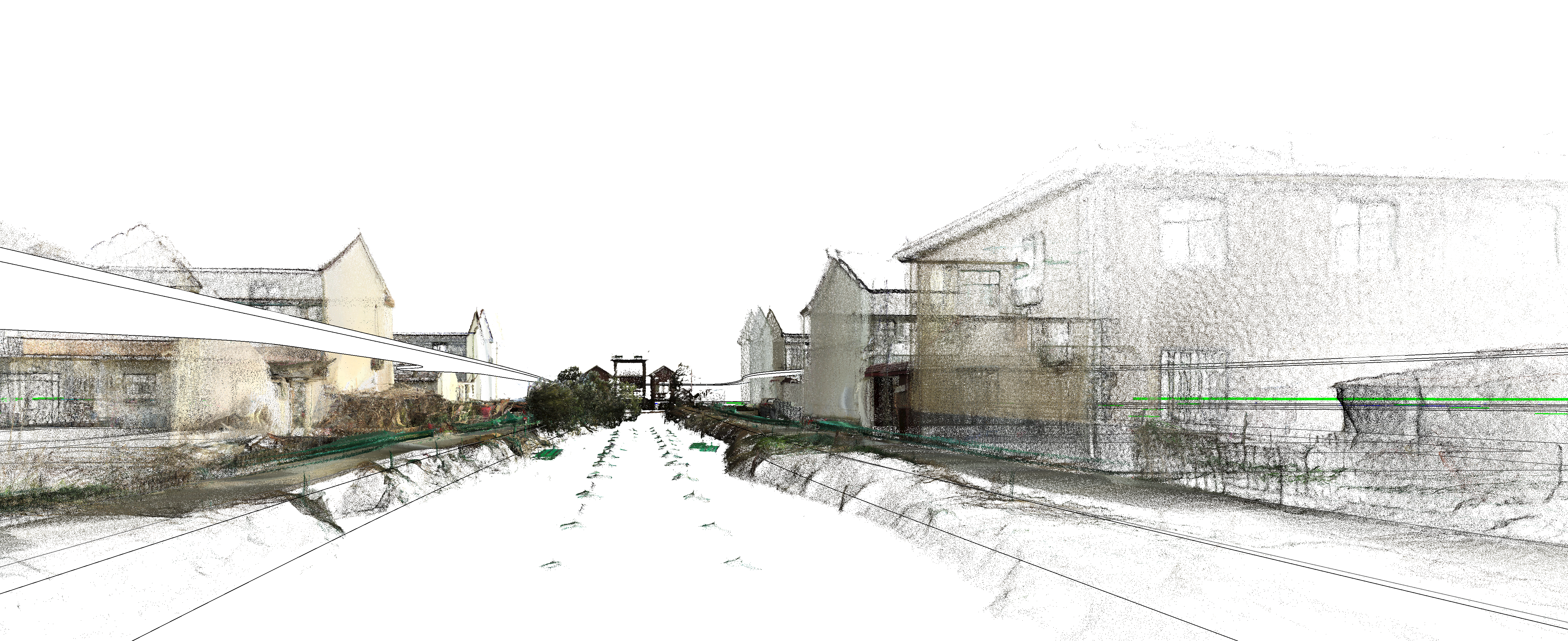
永福村案例
Yongfu Village
One site, three states: captured field, traced structure, constructed proposal.
AI 不是风格生成器。
它是把空间判断显性化的系统。
当直觉能够被结构、数据与场地验证,设计会更清晰。
AI is not a style generator.
It is a system for making spatial judgment explicit.
When intuition can be verified by structure,
data, and site, design becomes clearer.
建筑作品
Architecture Work
Built atmosphere remains the reference point for the computational system.
未来产品路线
Future Product Route
From Spatial Signature Engine to World Spatial Model.
Spatial AI 的最终目标不是乡村分析工具,也不是 GIS 可视化系统,而是让 AI 学会阅读世界空间结构。
The long-term goal is not a village analysis tool or GIS visualization system, but an engine that helps AI read the structure of space.
系统正在把 OSMnx、形态学、拓扑、水系依赖、建筑关系、高斯泼溅、点云与场景注册汇聚为同一个方向:世界空间结构语言。
OSMnx, morphology, topology, water dependency, building relations, Gaussian splatting, point clouds, and scene registry converge into a language of world spatial structure.
基于真实数据和先验经验的空间理解与生成模型, 不是虚空造物和空中楼阁, 而是服务于真实世界的数字新基建。
Spatial understanding and generative models grounded in real data and prior experience are digital infrastructure for the real world.
技术架构图 Architecture
OSM / 遥感 / 街景 / 点云 / BIM / 水系 / 建筑轮廓 / 高斯泼溅
OSM / remote sensing / street view / point clouds / BIM / water systems / building footprints / Gaussian splatting
形态学 / 拓扑 / 水系依赖 / 可达性 / 日照通风 / 合规审查
Morphology / topology / water dependency / accessibility / sunlight and ventilation / compliance review
统一坐标 / 多源对齐 / 场景注册 / 建筑关系图谱 / 空间语义层
Unified coordinates / multi-source alignment / scene registration / building relation graph / spatial semantic layer
布局生成 / 场景补全 / 城市更新推演 / 方案模拟 / 数字孪生部署 / BIM / 仿真环境
Layout generation / scene completion / urban renewal simulation / proposal modeling / digital twin deployment / BIM / simulation environments
将建筑师与设计师的经验转化为可计算参数:从优秀案例、现场判断和方案评审中提取空间尺度、动线效率、界面连续性、视线廊道、功能混合、场所氛围与合规边界;通过标注、评分、对比和修正反馈,持续校准模型的分析权重与生成约束。
Architectural and design experience is translated into computable parameters: spatial scale, circulation efficiency, interface continuity, view corridors, functional mix, atmosphere, and compliance boundaries are extracted from precedents, site judgment, and design reviews; annotation, scoring, comparison, and corrective feedback continuously calibrate the model's analysis weights and generative constraints.
提取不同聚落和城市的空间 signature:道路、水系、建筑、拓扑、密度与形态类型。
Spatial Signature Engine: extract road, water, building, topology, density, and typology signatures.
把卫星影像、LiDAR、点云、高斯泼溅、语义图层与数字孪生场景合并为可理解的空间场。
Multimodal Spatial Scene Engine: fuse satellite, LiDAR, point cloud, Gaussian splatting, semantics, and digital twins.
建立类似 CLIP 的空间嵌入:这个地方像威尼斯、像江南水乡、像现代主义郊区。
Spatial Embedding Engine: compare places through learned spatial similarity and semantic association.
形成具备拓扑推理、形态生成、城市相似性检索、空间记忆与设计反馈能力的基础模型。
Spatial Foundation Model: topology reasoning, morphology generation, urban similarity, retrieval, and spatial memory.
最终产品形态是统一的世界空间认知系统:让 AI 理解空间、聚落、道路、水系、建筑、地形与人类组织方式。
World Spatial Model: a unified spatial cognition system for places, settlements, roads, water, buildings, terrain, and human organization.